
Build Overview
The
EMAX Nighthawk 250 Kit is the best value '250' size FPV racer we offer. In this blog, we will go through an unboxing as well as a build overview to show how easy it is to build your very own FPV racer.
Unboxing
The EMAX Nighthawk kit comes in a clean minimalistic white box.

Opening the box reveals all the individual parts of the combo kit in their own packaging.

The combo comes with 4x SimonK 12A ESC, 1x CC3D Flight Controller, 4x ‘6030’ Carbon Fibre Props, 4x EMAX MT2204 2300KV Brushless Motors and the Carbon Fibre Airframe.


Assembly
The EMAX Nighthawk kit comes complete with everything you need to get the quadcopter up and running but we do recommend a couple of optional parts to make the build process easier.
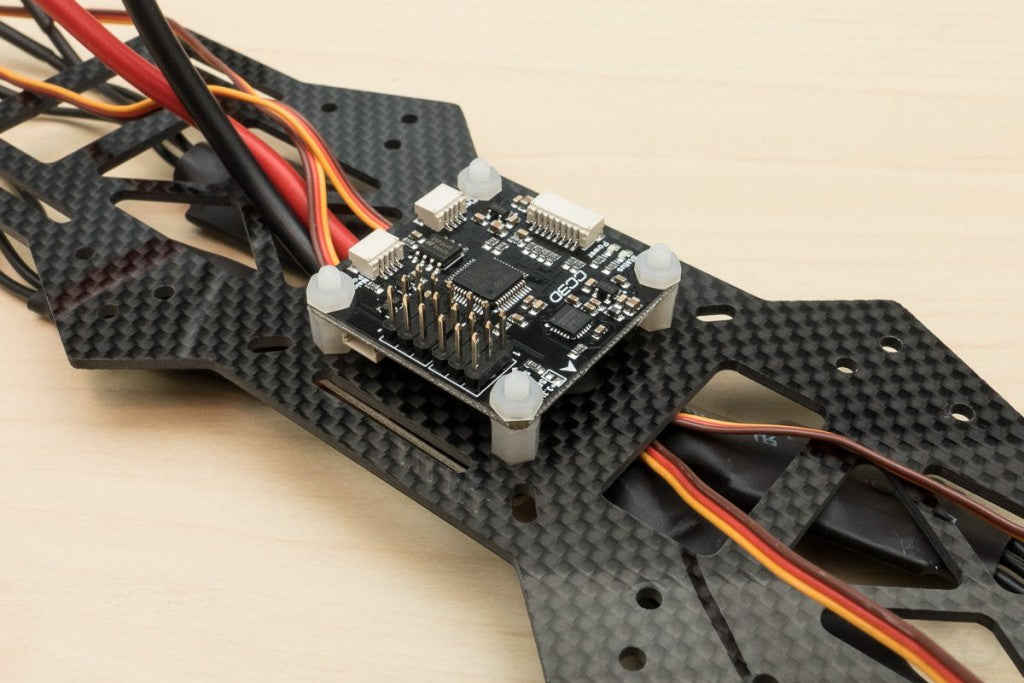
The
EMAX CC3D Power Distribution board acts like a central power hub for all 4 of your ESC to draw power from. You will need to hard solder all your ESC’s power connectors directly onto the power lead otherwise.
You will find both the ESC and motors will come with bare wires without connectors. We recommend a
packet of 2mm bullet connectors to be used instead of soldering the motors directly to the ESC. This will make future maintenance, upgrades and repairs a lot easier.

With the parts out of the way, we can move on to the fun part. Building the Nighthawk is fairly simple providing you have previous model building experience and basic soldering skill. Build time will vary depending on the skill level of the user.
We start by soldering the 2mm bullet connectors on all 4 motors and ESC and clean up the result with heat shrinks.


The 4 ESC are then soldered to the power distribution board, making sure the red wires goes to the positive(+) terminals and black wires to the negative(0). We will also solder on the battery lead at this stage onto the board. Please note the power lead is not included, we recommend using 12-16 AWG cables for the power lead.

The power board is attached to the bottom of the airframe’s main plate using thick double sided sticky tape. 4 screws secure the CC3D Flight Controller which sits on standoffs above the main plate.

Attach the support pillars using thescrews provided. We highly recommend using thread lock on all the screws to keep it from shaking loose in flight from vibrations.

Attach the arms between the main and bottom plate using the screws provided. The power board and the ESC will be pressed securely between the 2 plates to keep the parts from moving.


Screw the 4 motors onto the arms. Pay close attention to the motor rotation type on each of the arms. The front right motor should be counter clockwise then alternate between CCW and CW on each of the following arms. Plug the motor into the ESC via the bullet connector and tidy up the cables with cable ties.


Connect up the ESC to the Flight Controller, it doesn’t matter which order they go in now as you will need to reconfigure them once we enter the software setup stage.

Final step of the build is to attach the top plate onto the support pillars and plug in your favourite receiver; we are using the
FrSky Taranis X9D radio system.


Fully Built
And that’s it. We now have a fully built Nighthawk ready to be programmed via PC software. You can read our CC3D setup guide here.
OpenPilot CC3D Flight Controller Setup Guide

 tutorial
tutorial events
events


 tutorial
tutorial
















